The first film of the Tactile Anchoring Device in progress, showing the use of brushes and fans to generate the illusion of an invisible hand... https://youtu.be/vHaB6HBbQrs The system is based on an Arduino controls two sets of identical stimuli which move in synchronisation with each other [ servo motor, articulating solenoids, fans, lamps etc] Once the participant is experiencing the illusion, the operator or autonomous systems can trigger a ‘shock’ or threat stimuli. This is currently in the form of a solenoid which releases a heaved plum line weight which drops into the empty space. See the project page here. http://antonyhall.net/blogtactile-anchoring-device/
Tag: Tactile-anchoring
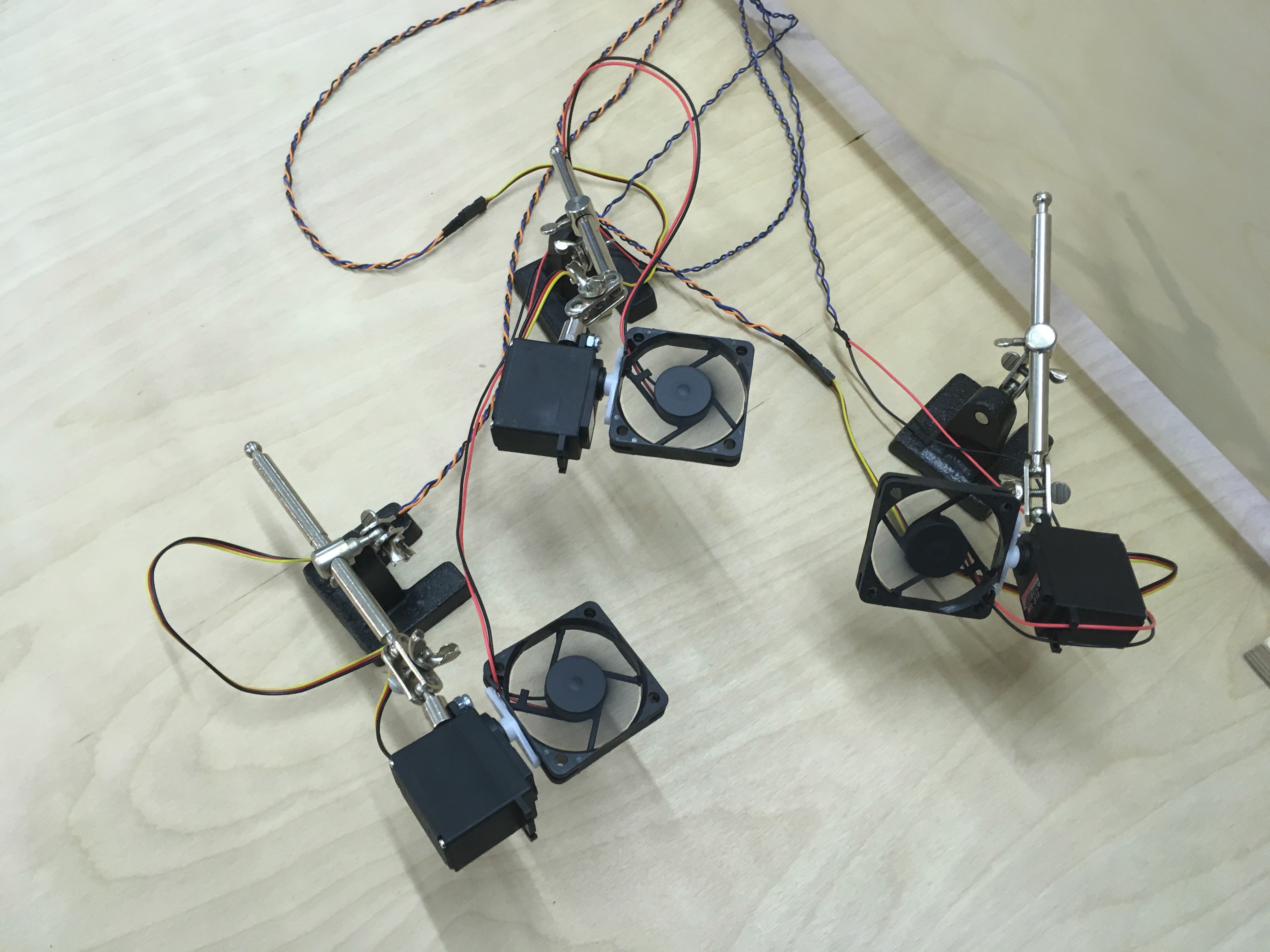
Tactile Anchoring Device Prototype 1
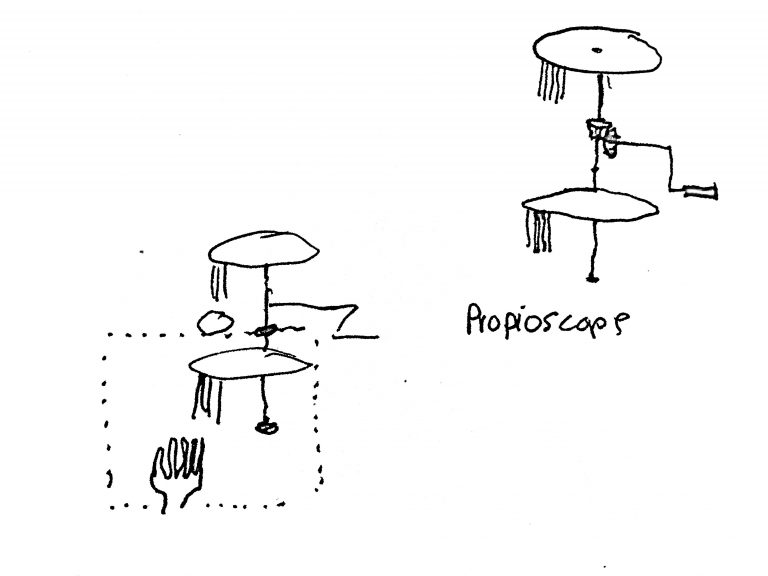
Here is my prototype device intended to help autonomously generate the 'invisible hand illusion'. For this experiment, I created a series of brushes which rotate at different speeds stroking empty space. The idea was that the participant watches this device, while the brushing motion is replicated one their real hand hidden nearby. This is building towards a piece of work called 'On the embodiment of a discrete Volume of Empty Space' [ See http://antonyhall.net/blogtactile-anchoring-device/ ] https://www.youtube.com/watch?v=DI-f6KgRD2w&w=700&h=400
“On the embodiment of a discrete volume of empty space”
As I mentioned before [Illusions of Invisible, alien hands, 3 arms, and shrinking bodies…] The Invisible Hand Illusion is a version of the Rubber hand illusion which uses no fake rubber hand at all. Instead, the participant focuses on an empty space in place of their hand. Sometimes a handless stump, and as a control, a wooden plank. they found that participants could embody a ‘Discrete Volume of Empty Space’. This interests me as it fits with a number of works which challenge the physicality of the art object, instead, I have presented amorphous forms of bubbling materials or even a plinth which automatically concealed the object. The idea of making an automated system to generate the illusion of an invisible hand seems the next step for my research.
Mechanically Augmented Reality
When I first learned about the Rubber hand illusion [RHI] I immediately began to think about ways in which the process could be automated to create an artwork, in which the experimenter's presence was removed. This could be done using sensors and a microcontroller to articulate solenoids to tap fingers for example. That thought train was on a back burner until discovered the work of fellow MMU PGR Lin Charlston. As part of her PhD research [See her profile here 'The Multimodal book as organism, artefact and assemblage: non-human agency in processes of growing and making'] She invented a beautifully simple, entirely mechanical device just to do exactly this. Your hand is placed inside a box, while the other hand turns a crank. On top of the box, another rubber hand