Further to my last post detailing experiments relating to the embodiment of invisible and even third hands, here are some notes on my first ‘Clay hand Illusion’ experiments…
The ‘Rubber hand illusion’ shows it is possible to convince participants that a rubber hand is their own by placing it in front of them while stroking it in the same way as their hidden real hand. The use of self-made clay hands, or objects [see below] in place of the rubber hand raises several interesting possibilities for exploration, which move away from the embodiment of replica body parts, and towards the possible embodiment of modified body parts, or completely ‘unfeasible’ objects.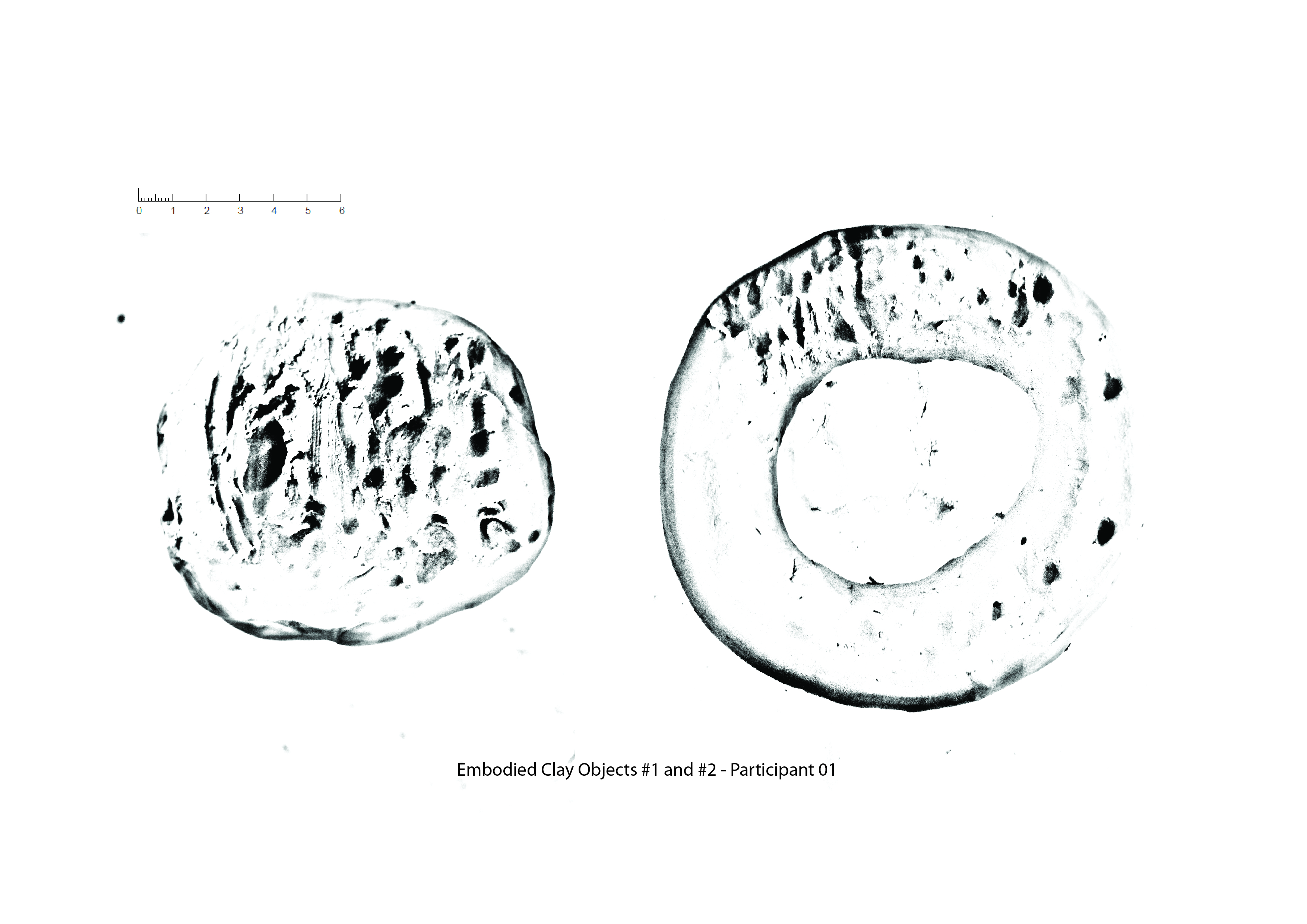 The clay allows for the gradual and immediate morphing of forms and for the participant to build a sensory connection with the object through its creation. As an artist [who has worked with clay] I feel a sense of deep connection with the objects I make, especially during making them. For example, I feel my face move and contort when I am trying to draw a face. I wonder if this is true of others? This is why for my first participants I am choosing those who work with clay.
The clay allows for the gradual and immediate morphing of forms and for the participant to build a sensory connection with the object through its creation. As an artist [who has worked with clay] I feel a sense of deep connection with the objects I make, especially during making them. For example, I feel my face move and contort when I am trying to draw a face. I wonder if this is true of others? This is why for my first participants I am choosing those who work with clay.
In regard to the embodiment of ‘unfeasible’ objects, the possibility of such a thing has been loosely disproven in several studies [See ‘The Invisible Hand Illusion’]. Whereby a plank of wood and a spoon were substituted in place of the embodied hand. Therefore I am keen to explore this further. So far I have had encouraging results which build on the results from the first workshop session [See image below]. Is it easier to achieve a connection with self-made objects, rather than an irrelevant object, such as the plank of wood?
 In my first ‘beta’ study, I worked with a participant who is a maker and uses clay in their work. After making a good connection with their self-made clay hand, I asked if they could make a non-hand like an object, or a modification to the clay hand, for a further experiment. They immediately opted to make a roundish blob. Followed by a further iteration; a doughnut shape. They were able to make a strong feeling of connection with the blob and the Doughnut, though not as strong as to the hand, and the connection took longer to achieve. The connection was patchy, in parts, and mapped over the surface.
In my first ‘beta’ study, I worked with a participant who is a maker and uses clay in their work. After making a good connection with their self-made clay hand, I asked if they could make a non-hand like an object, or a modification to the clay hand, for a further experiment. They immediately opted to make a roundish blob. Followed by a further iteration; a doughnut shape. They were able to make a strong feeling of connection with the blob and the Doughnut, though not as strong as to the hand, and the connection took longer to achieve. The connection was patchy, in parts, and mapped over the surface.
I found that the fingers could be mapped around the object by using a combination of synchronous tapping and swapping over the embodied finger with other digits, and the moving the already embodied finger over to a new location on the object. For example, the index finger feels fully connected to the clay object but, the ring finger does not. So I tap on the real ring finger and say I’m tapping on the index finger. They then seem to believe that this finger is now connected, when I return to the index finger – they now believe the finger next to the index finger is now newly connected to the clay. It’s not easy to explain! More on this later. The main part of the hand did not feel fully embodied.
It seemed like that with time, and combinations of synchronous and non-synchronous tapping, the hand could be mapped in two dimensions over the surface of the object.
I also found an interesting ‘compression’ in the perceived length of the fingers! When I tapped on the knuckle where the finger joins the hand, the participant thought this was the middle of their finger.
Working with the clay has an interesting effect of leaving traces of the tapping and stroking process so over time a textural surface is built up. When experimenting with the clay blob the participant made the following comment…
 Unfeasible Object #1 Participant 1
Unfeasible Object #1 Participant 1
“I fully believe that’s my hand, but like there’s an obstacle, like you cant push past it…it feels like my hand is made out of this clay, but there is only so far you can push into it…it feels like a barrier”
The barrier seemed to be just under the surface of the clay. Perhaps this suggests a surface-deep sensation of the perceived embodiment? Another interesting comment…
“It’s like when I’m making something, I can feel my hand moulding something, and it feels like I’m on the opposite side of that”
The significance of this comment hit home when my supervisor picked up on the idea of ‘actions’ ie how we might hold an object, or how the object was made. Could the embodiment of these objects be stronger if I considered them from the point of view of how they might be handled? This makes me think of ways in which the underside of the hand could be used in the illusion, rather than the back of the hand as is traditionally used. An upside down or inside out version of the Rubber hand Illusion? My experiment continues to evolve…